Background
Over the past few years, SwRI's Powertrain Engineering Division and Intelligent Systems Division have collaborated on a variety of Connected and Automated Vehicle (CAV) technologies that improve efficiency ranging from the vehicle level [Next-Generation Energy Technologies for Connected and Automated On-Road Vehicles (NEXTCAR)] to the intersection level (Energy Efficient Mobility Systems) up to the corridor level (Integrated Corridor Management).
The overall objective of this research effort is to establish a test methodology that would integrate a dynamic and reactive traffic simulator with instrumented test vehicles to precisely measure the real-world fuel efficiency gains of CAV technologies in various traffic scenarios. This research project is being conducted in 2 phases involving staff from Powertraining Engineering Division, Fuels and Lubricants Research Division, and Intelligent Systems Division.
Approach
Phase I of the program focused on leveraging instrumented Class 8 trucks and demonstrating the potential fuel economy benefits of CAV technologies akin to the NEXTCAR program. The team refined the traffic simulator setup built for NEXTCAR/Energy Efficient Mobility Systems (EEMS) program and generated additional scenarios as needed to represent a good mix or urban, suburban and highway driving. Once the virtual traffic environment was established, software-in-the-loop testing was conducted with our proprietary eco-routing, eco-driving, and lane merging algorithms. Baseline and optimal speed trajectories were recorded and configured on the DEVCon system on the trucks. Track testing was conducted to quantify the fuel economy benefits on the Class 8 trucks.
Phase II of the program is focusing on refining the test methodology. Specifically, the goal is to understand how to conduct closed loop testing of vehicles on test tracks with richer scenarios enabled via such virtual traffic environments. As a first step, the team is exploring driver-in-the-loop testing with virtual traffic on a test track. The team will then explore full automation testing with virtual traffic on a test track and will also investigate the impact of CAV technologies on aftertreatment systems in heavy duty trucks. Since phase II of the program is more about establishing and refining a test methodology, the team is leveraging the SwRI test track and SwRI owned vehicles.
Accomplishments
Phase 1 testing with the Class 8 trucks was successful and resulted in significant improvements in fuel economy as showing in the following tables:
Table 1: Results for modified NREL Port Drayage cycle
Test Result | |||
Nominal | Confidence Interval | ||
Fuel Saved | 14.24% | ± | 1.81% |
Improvement | 16.61% | ± | 2.11% |
Table 2: Results for traffic simulation generated traces
Test Result | |||
Nominal | Confidence Interval | ||
Fuel Saved | 6.83% | ± | 4.61% |
Improvement | 7.34% | ± | 4.95% |
Phase 2 is currently being conducted and results are not yet available.

Figure 1: The Ego Vehicle (red) interacting with traffic in the simulator, the Development Vehicle mounted on the Hub Dynamometer.
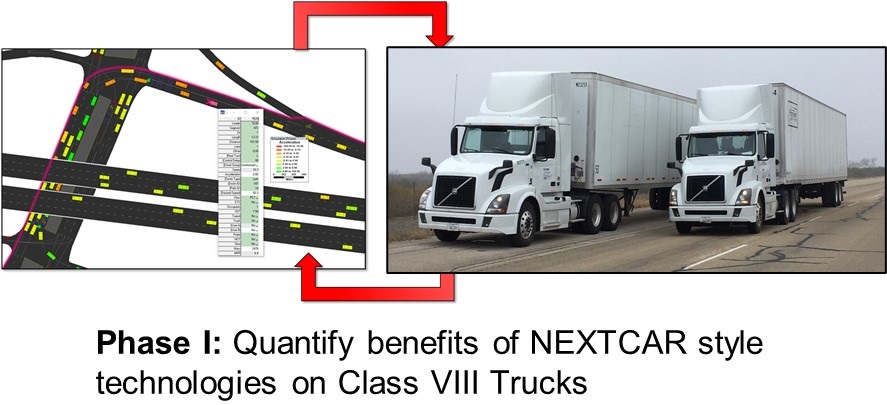
Figure 2: Quantify benefits of NEXTCAR style technologies on Class VIII Trucks.
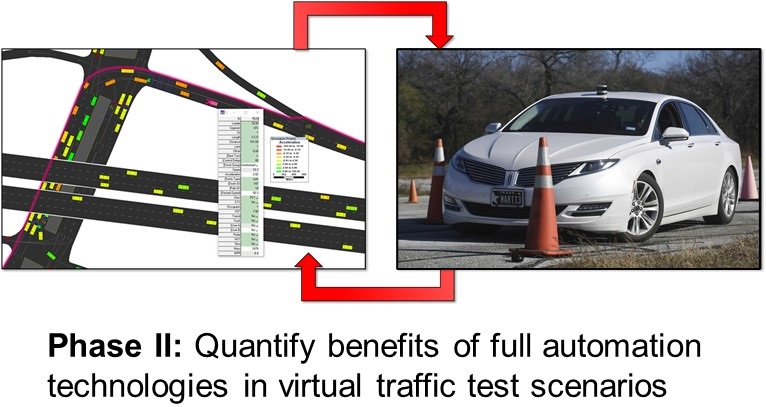
Figure 3: Quantify benefits of full automation technologies in virtual traffic test scenarios.