Background
Across numerous industries, there has been a push to replace dull, dirty, and repetitive manual tasks with robotic solutions. While significant effort has been invested in automating tasks in open environments, automating similar tasks in confined spaces is beyond the reach of current technology. Confined spaces are typically defined as enclosed areas with small access ports. The access ports may be elevated, and the floor of the confined space may be curved or contain ribs. Confined spaces may consist of a series of smaller cells, connected by sharp turns or elevated accessways. There has been little to no research on systems that are sufficiently stable to perform work beyond visual inspection inside a confined space.
Approach
This project focused on research for early system concepts for navigating an arbitrary array of enclosed chambers, connected by raised openings, while performing processes involving a non-trivial level of force. The prototyping phase of the project began with constructing a test fixture that mimicked constraints and features commonly found in the targeted industries. This test fixture was used for rapid prototyping and testing of a list of initial concepts and helped narrow the solution space.
Accomplishments
The Advanced Mobility Crawler (AMC) consists of a linear gantry with a multiple degrees of freedom (DOF) arm. The arm is capable of folding parallel to the gantry so that the system has a slender profile conducive to fitting through narrow entryways.
Future work on this project will involve scaling and adapting this conceptual model for various applications. Depending on the application, additional research on tether management may be required. For environments with multiple connecting cells, managing an unwieldy tether for a process may be challenging.
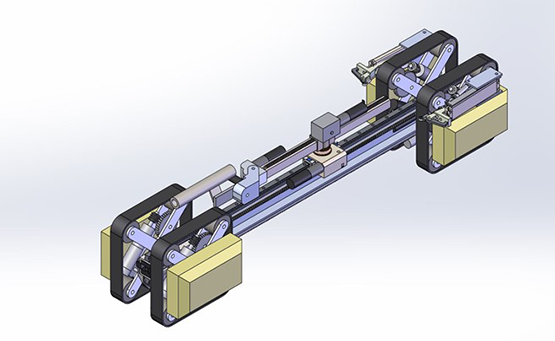
Figure 1: System mobility is accomplished with compact tread units located at either end of the system. The tread units are designed to be driven on both the front and bottom surfaces. When driving on the bottom portion of the tread parallel to the ground, the AMC navigates like an ordinary tracked vehicle. This is the primary drive mode when the system is moving into position to perform work. Navigating raised obstacles uses a controlled mass transfer approach that keeps the center of gravity near the sill of the obstacle during motion. In testing, this was found to be necessary, as brute force methods of dragging the system over an obstacle resulted in very bulky high-force actuators. Because the AMC is not a flexible system, both tread units and the tool can drive linearly along the rail, to change the center of gravity location without bending.