Background
For this Presidential Discretion Internal Research (PDIR) project, SwRI investigated the performance of algorithms applied to the output of a 77 GHz, high-resolution radar. Specifically, how well this class of radars can sense objects occluded by snow cover and to better understand terrain through varying depths of accumulated snow. SwRI has contributed significantly to advancements in Automated Vehicle (AV) research for over a decade. While SwRI and the AV industry continue to advance autonomous mobility in on/off-road environments, less progress has been made for AVs operating in snowy conditions since it is difficult for AVs to perceive what exists beneath snow cover. Forward-looking cameras, Light Detection and Ranging (lidar) sensors, and most automotive-grade Radio Detection and Ranging (radar) sensors are known to sense through light snowfall due to its relatively low density; however, none are effective at sensing through accumulated snow cover. In areas where snow accumulation is common, such as the arctic, accurately identifying and localizing hazardous obstacles can be extremely challenging. Cameras and lidar both produce dense data via images and point clouds, but are limited in determining what, if any, objects are occluded by the snow. Radar is capable of sensing through several conditions in which other sensors perform poorly (e.g., fog, rain, snow), which is why it is favored by Advanced Driver-Assistance Systems (ADAS) for on-road localization today; however, these sensors are not currently used for understanding the underlying terrain (beneath the snow) in either commercial or defense mobility applications. New automotive-grade radars promise greater accuracy and better resolution/range. Characterizing the ability of high-definition automotive radar to detect materials occluded by snow and to understand the covered terrain on this PDIR will greatly advance AV technology for both defense and commercial applications.
Approach
SwRI researchers modified their in-house Engineering Technology Demonstrator (ETD) platform to house a lidar and a new high-definition automotive radar. The researchers then set up and calibrated the lidar/radar onto a vehicle at a remote winter test facility in northern Michigan for the 2022/2023 winter season. Objects with known dimensions were placed in a test environment and natural snowfall was allowed to accumulate over several weeks. During this time, data was routinely collected. Another data collection was performed during the 2023/2024 winter season, which involved manually accumulating snow into specific depths to validate the radars capability of sensing objects beneath snow cover.
Accomplishments
Through both data collections, SwRI concluded that while this class of radar would not generalize well for sensing obstacles beneath heavy snow cover, it does allow for very rapid, high-quality maps that can aid automated vehicle detection in environments where lidar and cameras may fail. SwRI researchers also created a novel addition to the Engineering Technology Demonstrator (ETD) harness that allowed for high-accuracy extrinsic sensor calibration between lidar and radar. The calibration procedure (for calibrating the radar with a lidar) was defined and tested while at SwRI headquarters and then was successfully performed at a remote test site. Data analysis algorithms were successfully developed and implemented to compute and overlay radar readings into globally accurate positions for accurate comparison across multiple data collections. Additional algorithms were developed that can readily convert the radar returns into usable datasets for segmentation and classification deep learning networks.

Figure 1: Modified ETD mounted to test vehicle at test site.
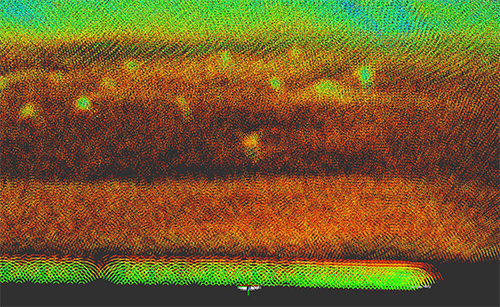
Figure 2: Accumulated and aligned radar point cloud returns.