Background
The ROS-Industrial program seeks to apply the power and capabilities of ROS (Robot Operating System) to advanced industrial applications. Industry collaborators frequently identify “ease of use” as one of the biggest challenges to the wider adoption of ROS software. Based on this feedback, SwRI began developing an application to bring together many commonly used ROS tools and capabilities in a single user-friendly interface. In Phase 1 of this effort (3/2021 – 4/2022), we created a proof-of-concept application with a few core capabilities. During Phase 2 (4/2022 – 10/2023), we expanded that feature set and prepared to release the tool for public use.
Approach
This tool was developed as a modular plugin “workbench” for the open-source FreeCAD application (Figure 1), which allows users to work in a familiar design environment. This plugin was given the name “SwRI Workbench for Offline Robotics Development” (SWORD). The SWORD workbench provides tools to define and execute motion planning problems using a wide range of ROS libraries.
The SWORD workbench is intended to target both ROS developers and robot end-users. It can be used to simplify the software development of ROS motion planning applications, but it can also be used to exercise those same motion planning tools without writing any code. SwRI plans to offer this workbench as a paid software license to the robotics community, and the license fees will help fund further development.
Accomplishments
An initial beta test of SWORD was released to a selected group of interested users. Feedback from this testing group was used to drive the addition of new capabilities, including additional configuration of motion planning and export to familiar document formats. The current capabilities allow users to define a robot and its environment, to specify the desired motion path using CAD geometry or manual waypoints, to configure the motion-planning tools, to compute a robot trajectory and to export the result for execution on a physical system. This workbench is already being used internally on SwRI projects, improving the efficiency of ROS development efforts. SwRI officially released SWORD to the public in Q1 2024. Please visit our website or contact us for more information or a trial license.
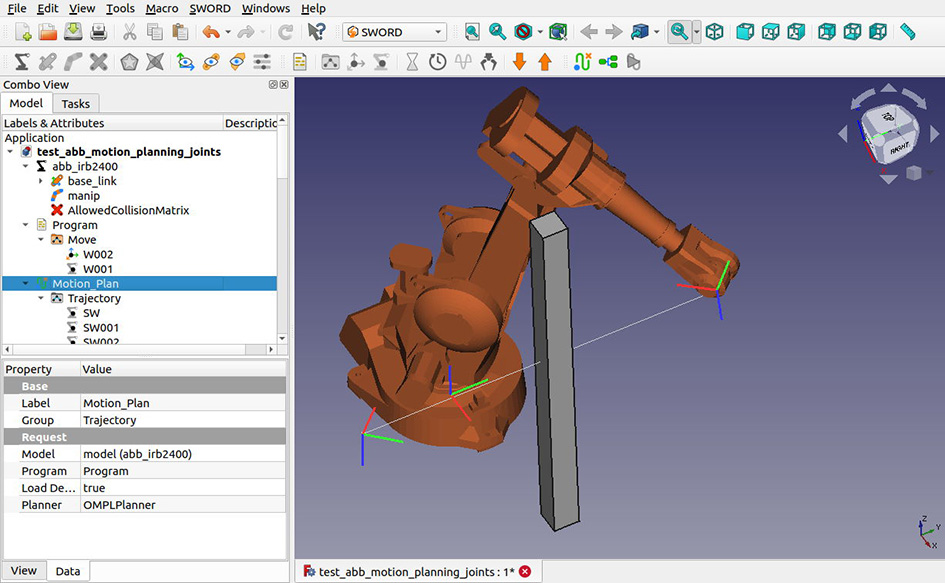
Figure 1: FreeCAD application with a SWORD workbench and a motion plan.