
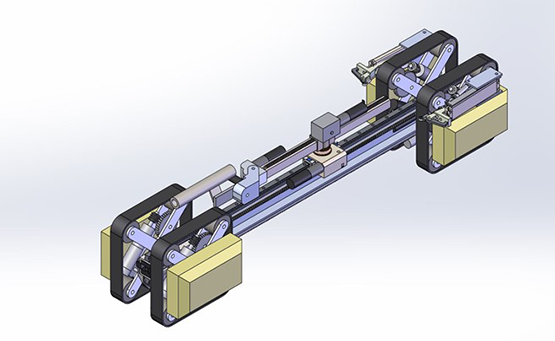
Figure 1: System mobility is accomplished with compact tread units located at either end of the system. The tread units are designed to be driven on both the front and bottom surfaces. When driving on the bottom portion of the tread parallel to the ground, the AMC navigates like an ordinary tracked vehicle. This is the primary drive mode when the system is moving into position to perform work. Navigating raised obstacles uses a controlled mass transfer approach that keeps the center of gravity near the sill of the obstacle during motion. In testing, this was found to be necessary, as brute force methods of dragging the system over an obstacle resulted in very bulky high-force actuators. Because the AMC is not a flexible system, both tread units and the tool can drive linearly along the rail, to change the center of gravity location without bending.