
Background
This research enables robotics in space by leveraging existing SwRI robotics capabilities and transforming them to meet the current and future needs of the space industry. The space industry is pushing for industrial-style robotics and perception capabilities to enable In-space Servicing, Repair and Maintenance (ISAM). While there have been a few early missions in this arena, the industry needs robotics for ISAM that are less expensive, smaller, reconfigurable, and more easily reprogrammable.
Approach
This project advances technology for ISAM by focusing on two areas of research: Vision systems in space: Equip cameras and other sensing modalities with machine vision using low-power field programmable gate arrays (FPGAs). This enables passive advanced image processing in space for building a 3D model of a spacecraft and identifying object heading, speed and rotation.
Dynamic path planning: Use hardware and software to simulate planning robot paths while considering the variables of space operations, such as microgravity. This enables leveraging the dynamics of the system to generate optimized robot trajectories for space systems.
Accomplishments
The vision systems research team has completed implementing a Simultaneous Localization and Mapping (SLAM)-based algorithm for object characterization on an FPGA using simulated data. The team is in the process of gathering data from our Space Robotics Center to further test the SLAM algorithm.
The motion planning research team has completed simulation testing and modeling of the Space Robotics Center in the simulation environment and is setting up the hardware simulation. In the Space Robotics Center, a robot arm has been mounted to a floating platform and is executing simple trajectories. Using a motion capture system, the team has validated the simulation while working towards generating more complex trajectories and paths. The team is currently working on adapting the motion planning for commercial use cases.
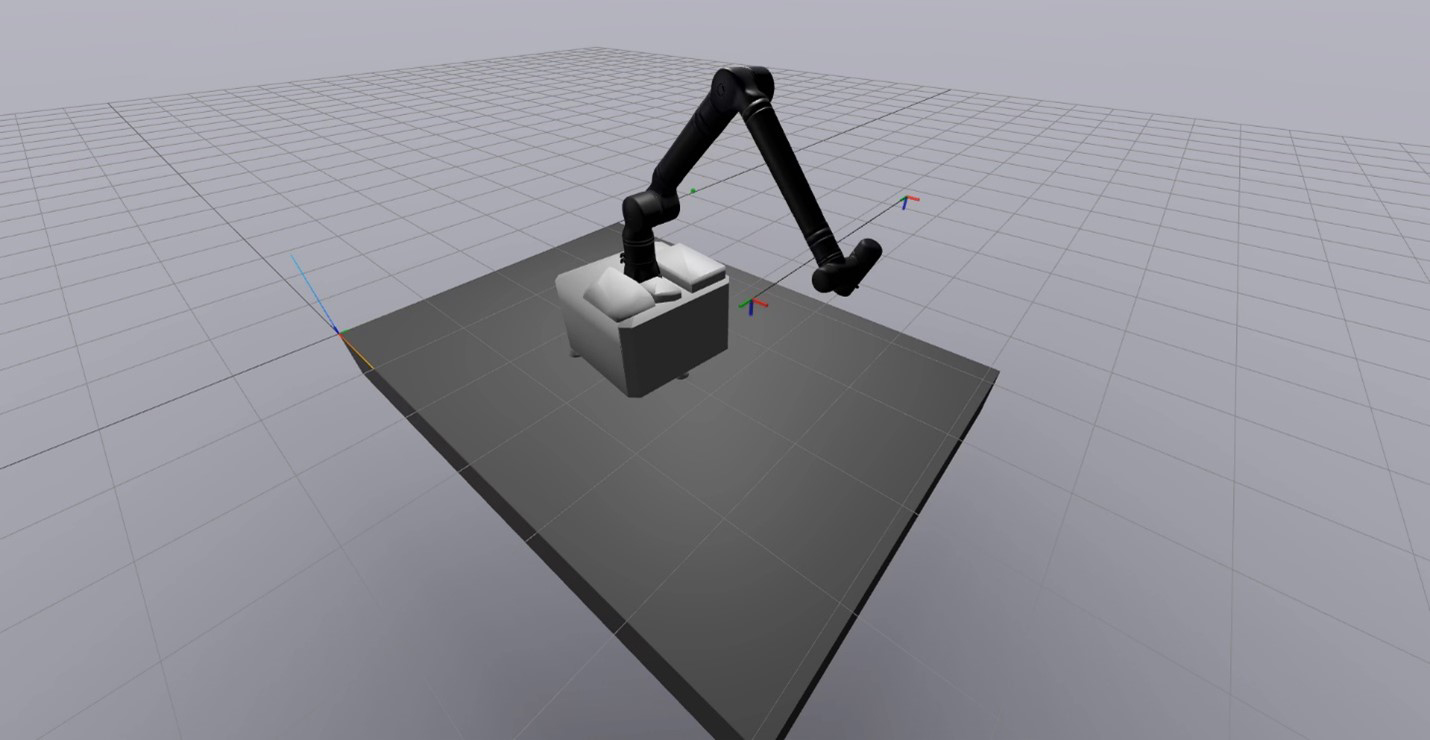
Figure 1: Space Robotics Center models used to simulate a motion plan.
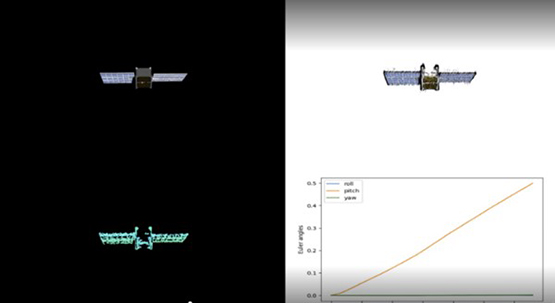
Figure 2: Feature tracking algorithms deployed on an FPGA can reconstruct the general geometry and movement of an object in space using simulated camera data.