
Background
Using global navigation satellite systems (GNSS) to map and to navigate planetary bodies is a distant milestone. Even with GNSS, secondary localization systems are desirable for when primary systems fail on earth and other celestial bodies. Reliable systems are necessary for upcoming lunar rover missions where the environment presents the following challenges for localization of mobile robots:
- Lack of magnetic field for compasses
- Craters and other terrain obstructions
- Areas of extreme high and low illumination (unmitigated by atmospheric scattering)
- Low lighting angles that challenge visual localization techniques
- No existing infrastructure for localization
- Terramechanic variables such as regolith deformation and wheel sinkage/slippage
SwRI’s Ranger system is an effective, high-precision localization technology that has been proven effective on many earth surfaces and under many lighting conditions. Thus, it is a promising option for localization on typical non-terrestrial surfaces. In this project, we tested Ranger on simulated lunar regolith under several lighting and environmental conditions.
Approach
We collected data and images using an unmodified version of the Ranger software and hardware mounted to a rover base that was manually moved over the regolith simulant. By moving the rover forward a set distance and then back to its starting location, we tested retrotraversal performance and localization results by comparing the system’s calculated distances moved and final position to the exact controlled distances and final position. A Creaform 3D scanner measured the ground truth of the rover’s location and movement. To emulate ground conditions on the moon, we also performed experiments while changing the orientation of the test fixture as the robot traversed the surface to simulate the rover moving over a crater. We changed the orientation and intensity of the lighting to test the system’s performance with environmental lighting changes that range from near darkness to bright light, appropriate to the lunar south pole.
Accomplishments
The results of this research suggest that Ranger collects enough features to match a map that emulates lunar surface conditions and that the matches are sufficiently consistent for normal operation.
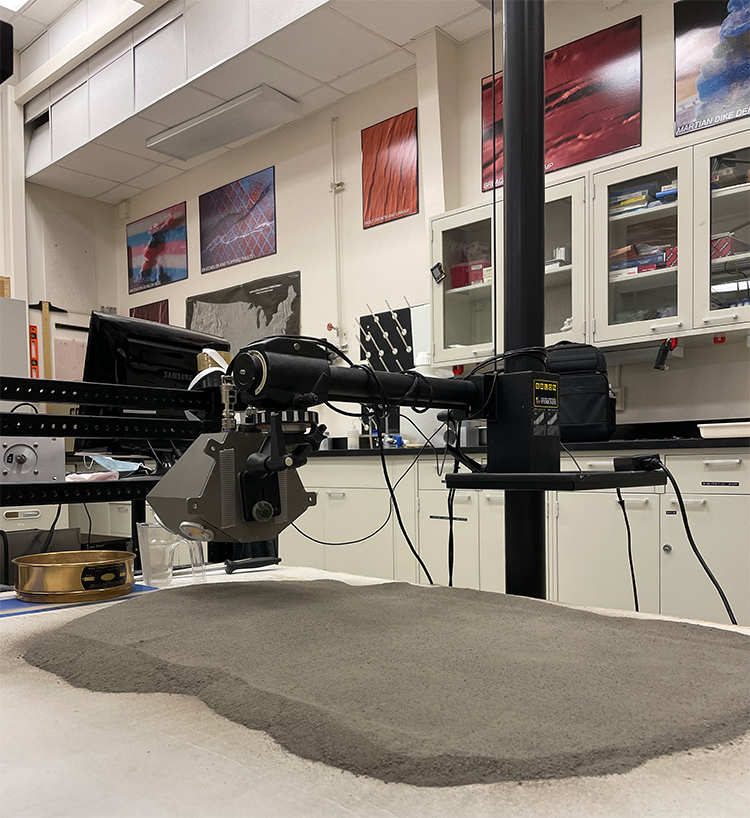
Figure 1: Test setup showing Ranger Evaluation Kit on regolith simulant.